arduino: SD-card success!
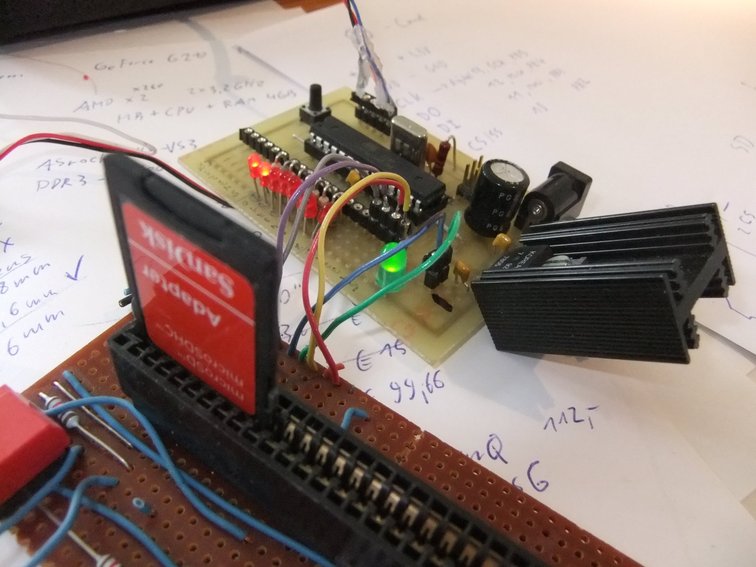
Tuesday, March 13th, 2012Mein erstes Projekt, welches komplett mit 3,3V läuft. Ich habe keinen 3,3V Festspannungsregler auf Lager aber einen DC-DC Wandler den ich auf 3,30V einstellen konnte. Ein Atmega328 läuft mit 16MHz Quarz, daran angeschossen mein USB-serial Kabel und mein DIY micro-SD card slot: Ein handelsüblicher microSD nach SD Adapter steckt in einem alten ISA Steckplatz-Sockel. Vermutlich kann ich die 6 Kabel auch direkt an den Adapter anlöten und somit viel Platz sparen.
Die Brücke für GND von Pin 3 auf 6 ist übrigens in dem Adapter schon eingebaut.
In den Beispiel-Sketches “DumpFile” und “ReadWrite” musste ich jeweils
den ChipSelect Ausgang bei SD.begin() von 4 auf 10 ändern.
Binary sketch size: 11698 bytes (of a 30720 byte maximum)
Pinbelegung (ohne Gewähr)
micro-SD card ------------- 1 n.c. 2 CS 3 DI 4 +3,3V 5 CLK 6 GND 7 DO 8 n.c. SD card ------- 9 n.c. 1 CS 2 DI 3 GND 4 +3,3V 5 CLK 6 GND 7 DO 8 n.c. SD-Card Arduino (Atmega) --------------------------- +3,3V +3,3V GND GND CLK Digital 13, SCK (PB5) DO Digital 12, MISO (PB4) DI Digital 11, MOSI (PB3) CS Digital 10, (PB2)
http://www.dharmanitech.com/2009/01/sd-card-interfacing-with-atmega8-fat32.html
http://www.frank-zhao.com/cache/fat_sd.php
http://www.avrprojects.info/avr-interfacing/reading-and-writing-sd-card-using-atmega16/
http://elasticsheep.com/2010/01/reading-an-sd-card-with-an-atmega168/